



Overview
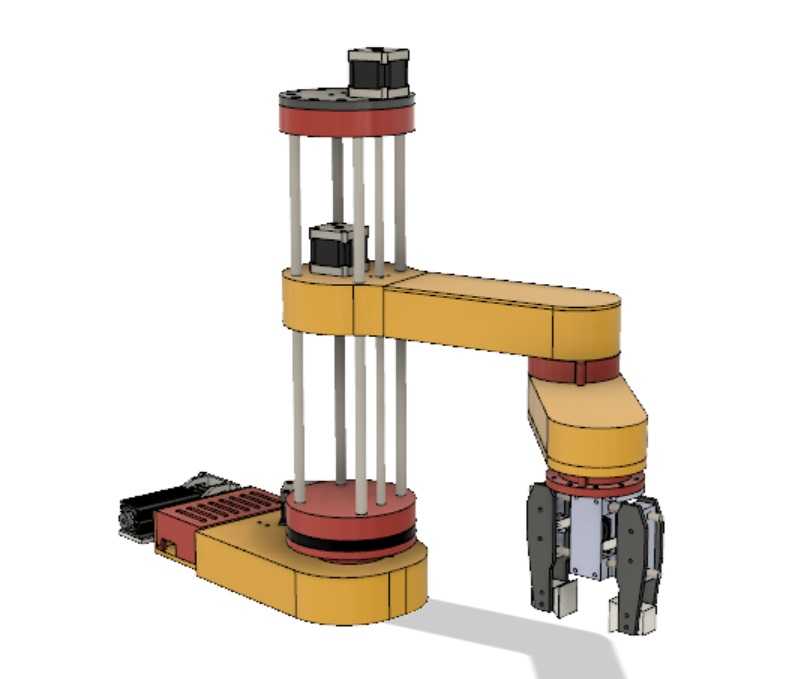
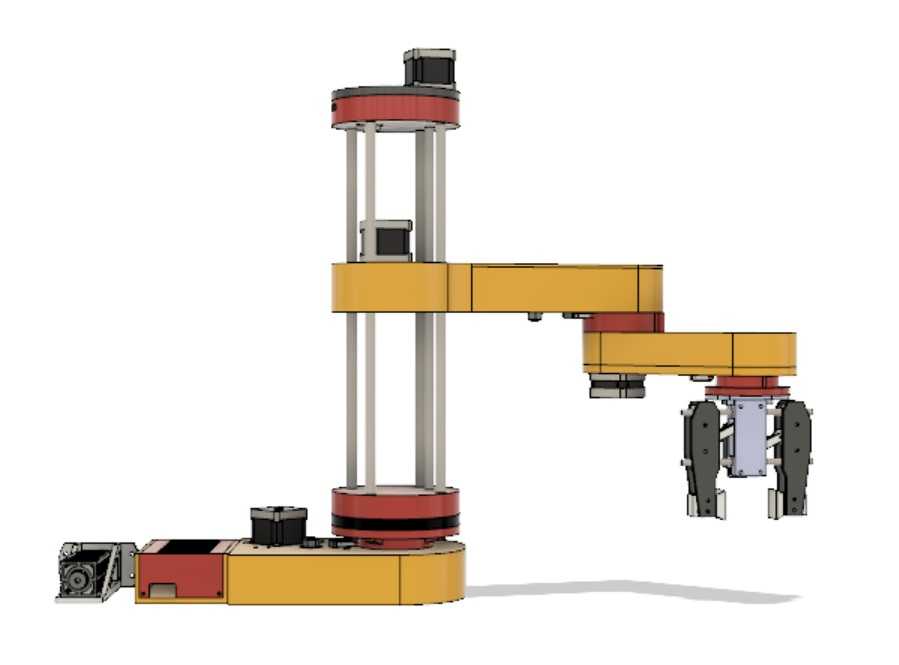
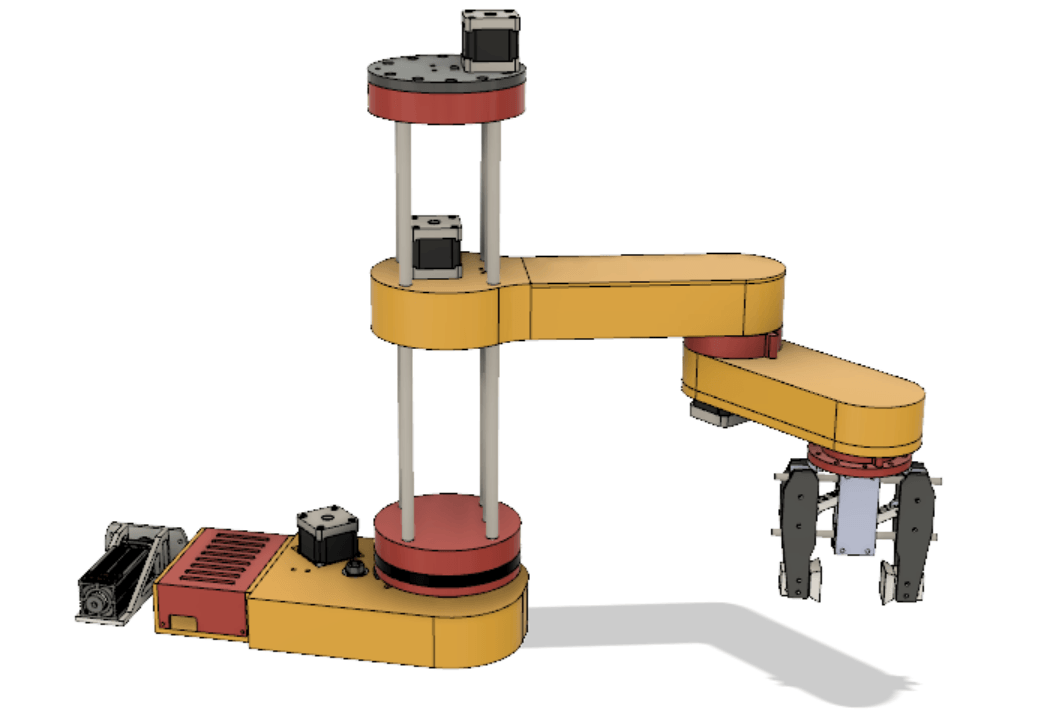
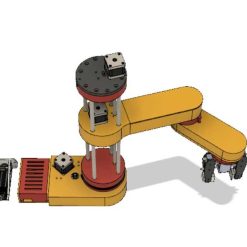
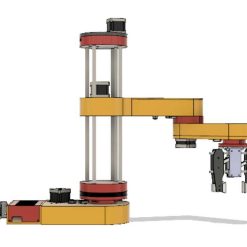
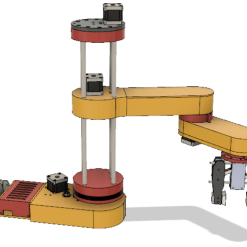
DIY SCARA Robot Arduino Based has 4 degrees of freedom and it’s driven by 4 NEMA 17 stepper motors. Additionally, it has a small servo motor for controlling the end effector or the robot gripper in this case. The brain of this SCARA robot is an Arduino UNO board which is paired with a CNC shield and four A4988 stepper drivers for controlling the motors.
Using the Processing development environment, I made a Graphic User Interface which features both Forward and Inverse Kinematics control. With the Forward Kinematics we can manually move each robot joint in order to get the desired position. Using the sliders on the left side, we can set the angle of each joint. The final position of the end effector, the X, Y and Z values are calculated and printed on the right side of the screen.
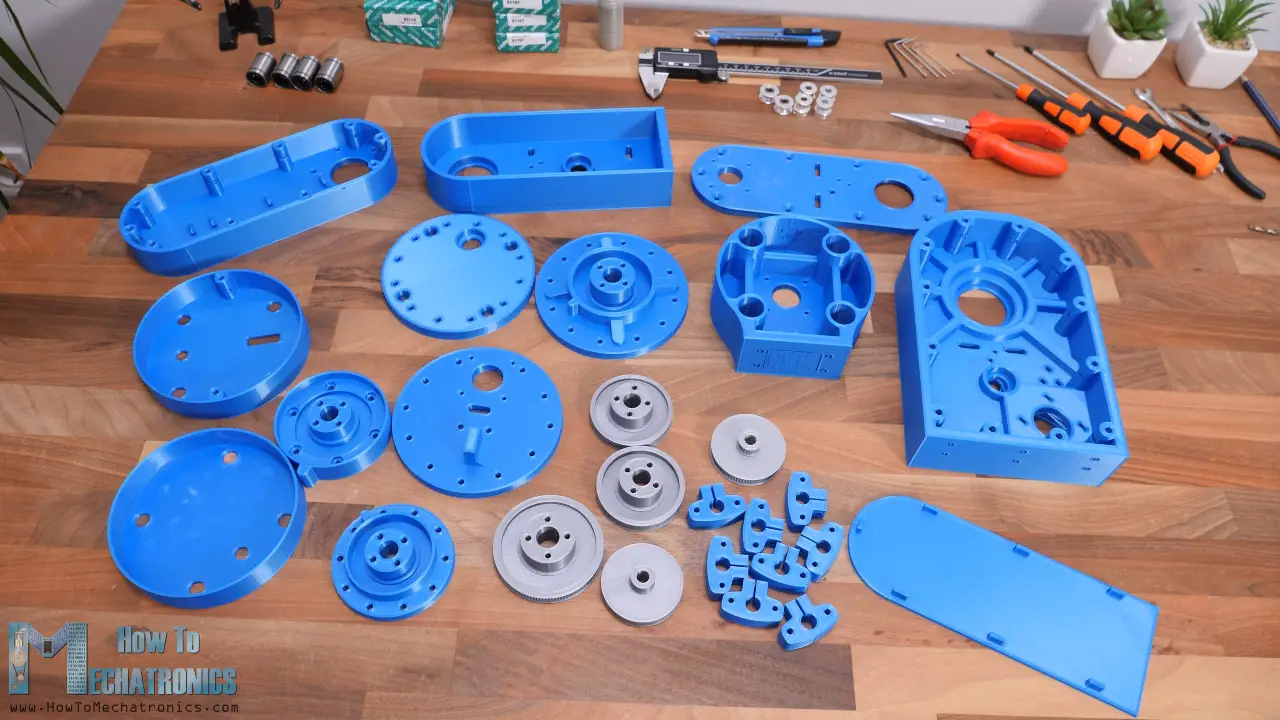
Here are all of the 3D printed parts.
Of course, the robot can also operate automatically. Using the “Save” button on the program we can save each movement or position of the robot. Then when we press the “Run” button the robot will execute the stored movements in a loop, from the first one to the last one, over and over again. We can also adjust speed of movement and the acceleration from the User Interface.
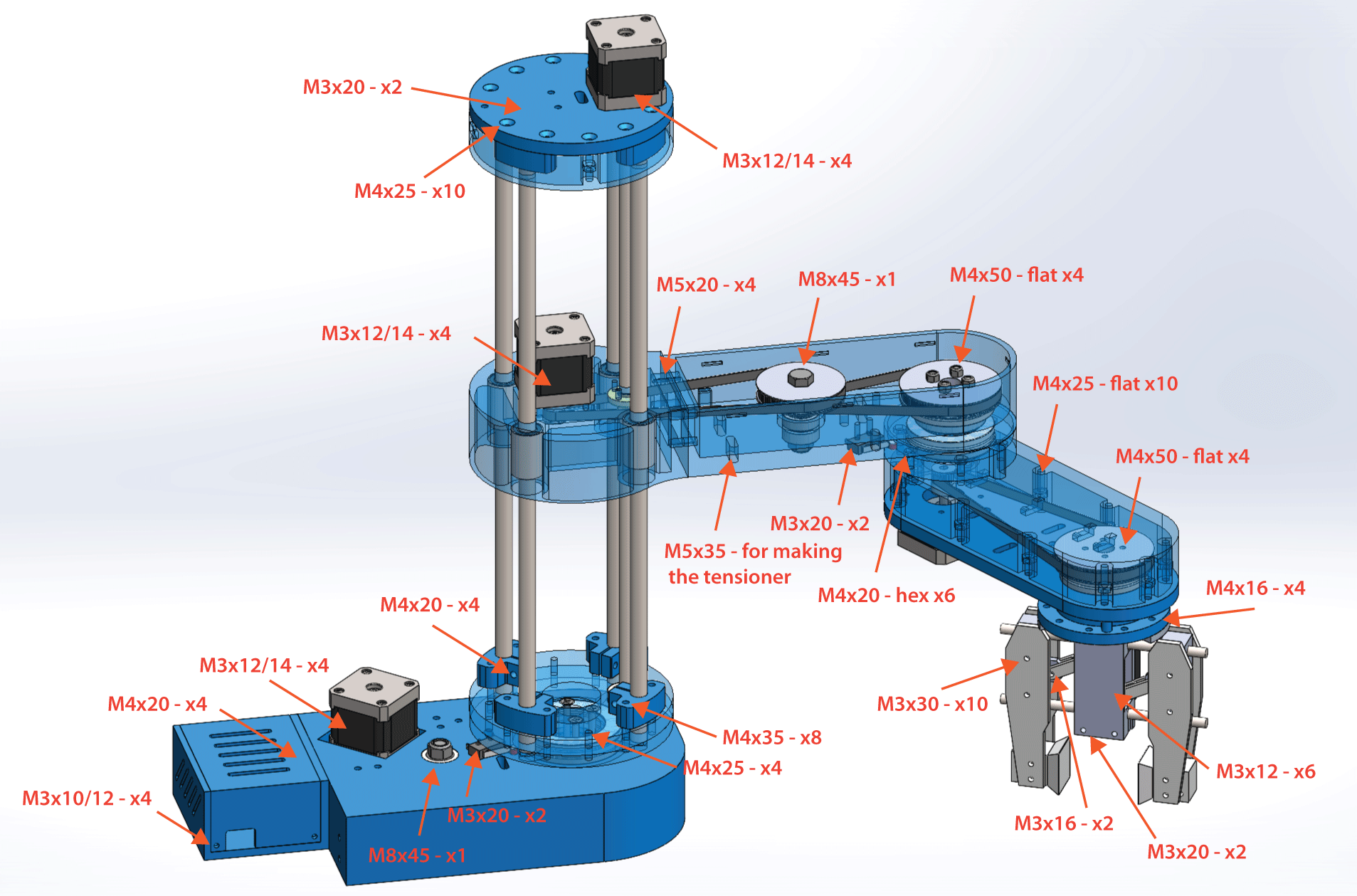
Here are the bolts sizes required for this project:
We start the assembly with base. Here first we insert a radial ball bearing with 35mm inner and 47mm outer diameter.
FOR ANY GUIDE VISIT THIS WEBSITE
Package include of DIY SCARA Robot Arduino:
- All 3D Printed Parts
- 4xStepper Motor – NEMA 17
- 4xA4988 Stepper Driver
- 1xArduino CNC Shield
- 1xArduino Uno
- 1xMG995 Servo Motor
- 6xLimit Switch
- 1x12v 5A DC Power Supply
- 4x Smooth rod shaft – 10mm 400mm
- 1x Lead screw – 8mm 400mm
- 4x Linear bearings 10mm
- 2x 51108 Thrust ball bearing 40x60x13mm
- 4x 51107 Thrust ball bearing 35x52x12mm
- 5x 608 Radial ball bearing 8x22x7mm
- 1x 6807 Bearing
- 2x 6806 Bearing
- Various lengths M3, M4 and M5 bolts and nuts
- 1x200mm loop belt
- 2x300mm loop belt
- 2x400mm loop belt
Same like Project with Cheap Price
Be the first to review “Professional DIY SCARA Robot Build Your Own Arduino Based Robot”
Related products



Quadcopter & Parts

Quadcopter & Parts

Robotics & Parts






Connecting Interface and Wires
Reviews
There are no reviews yet.