








Vexta Stepping Motor Nema 23
- 4.5v dc
- 2a
- 1.8degree/step
- 6 wire.
- Bipolar
High Resolution Type
These 2-phase, high resolution stepping motors have half the
step angle of standard stepping motors. The high resolution
type increases motor resolution from 200 steps/revolution to
400 steps/revolution. Smaller step-angles can be achieved
by half-step driving or microstep driving. Such options,
however, do not improve accuracy. Other than having twice
as many rotor teeth as standard stepping motors, all other
structures are exactly the same as the standard motors.
SH Geared Type Nema 23
Incorporating SH gears with high permissible torque, these
models offer the full benefit of the speed reducing capability
of geared motors, delivering high resolution, high torque and
smooth low-speed rotation. With performance like this, the
SH Geared type can easily satisfy the requirements of
various kinds of low-speed positioning applications.
Smooth Rotation at Low Speeds
Stepping motors at low speed produce a relatively high
amount of vibration. Use of a gearhead allows for an
increase in the speed of the motor which results in a
smoother motion while maintaining the low output speed
required by the application.
Six Gear Ratios Nema 23
SH geared motors are available with six different gear ratios:
3.6:1, 7.2:1, 9:1, 10:1, 18:1, 36:1. The low ratios of these
gearheads can greatly facilitate speed control of the 2-phase
stepping motors.
✽ PK223-SG type is not available in a gear ratio of 3.6:1.
Ideal for High Inertia Drive
The stepping motor itself can drive an inertia of 10 times the
rotor inertia. The geared type can reduce the load inertia by
the square of the gear ratio. Therefore, the geared type is
suitable for driving larger inertial loads.
High Inertia Capability
The PV Series provides, on average, 1.5 times higher torque
than a standard stepping motor. By utilizing a larger rotor
diameter, larger magnets can be used to significantly
increase the output torque.
PV Series
Angle–Torque Characteristics
All equipment has a friction load, and the motor stops when the motor output
torque and friction load torque are balanced. As shown in the characteristics
above, the larger the output torque per step angle, the less the motor is influenced
by the friction load, so positioning accuracy is improved. Stop positioning
displacement by external force does not occur as often.
Pulse Speed [kHz]
0 0.5 1.0 1.5 1.8°/step
100 200 300 400 500
Speed [r/min]
Torque [oz-in]
0
300
200
500
400
100
PV Series PV269-D2.8BA: Bipolar 2.8 A/Phase, 24 VDC
Standard PK296-E4.5B:
Bipolar (series) 3.18 A/Phase, 24 VDC
Standard PK268-E2.0B:
Bipolar (parallel) 2.8 A/Phase, 24 VDC
0
2.0
3.5
3.0
2.5
1.5
1.0
0.5
Torque [N·m]
Related products
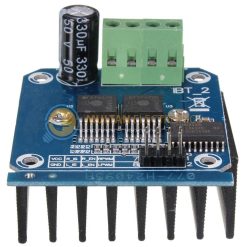
Breakout Boards & Modules

CNC & 3D Printer Parts
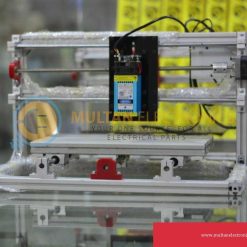
CNC 3018,DIY Engraving Machine 15W 450nm laser engraving GRBL control



CNC & 3D Printer Parts
40/80/120/160/200/280/320 Thermoelectric Cooler Peltier Aluminium Water Block

CNC & 3D Printer Parts


CNC & 3D Printer Parts
Stepper Motor 5V DC 4-Phase 5-Wire with ULN2003 Driver Board


CNC & 3D Printer Parts
10mm Screw Rod M10 Threaded Rod For CNC Machine And 3D Printer